
Appliquer des propriétés de la peau humaine aux robots leur permet de retranscrire plus fidèlement des émotions et de communiquer de manière plus réaliste.
Pour adapter la peau humaine aux robots, les chercheurs ont utilisé une nouvelle technique basée sur des ancrages de type perforation afin d’attacher le tissu biologique à la structure robotique.
Ces ancrages sont inspirés des ligaments cutanés humains, qui sont de petites structures de collagène et d’élastine reliant la peau aux tissus sous-jacents.
Pourquoi utiliser la peau vivante sur des robots ?
La peau humaine possède de nombreuses propriétés utiles pour les robots, notamment la sensibilité tactile, la capacité d’autoréparation et une apparence humaine réaliste. Dans des environnements imprévisibles, les robots peuvent se rayer ou se détériorer. La capacité de la peau à se réparer elle-même est donc cruciale pour prolonger la durée de vie et l’efficacité des robots.
Les chercheurs obtiennent une peau de synthèse grâce à un mélange de cellules de peau humaine cultivées dans du collagène. Ce gel est ensuite apposé sur une base en résine imprimée en 3D et c’est là qu’intervient l’ancrage de type perforation.
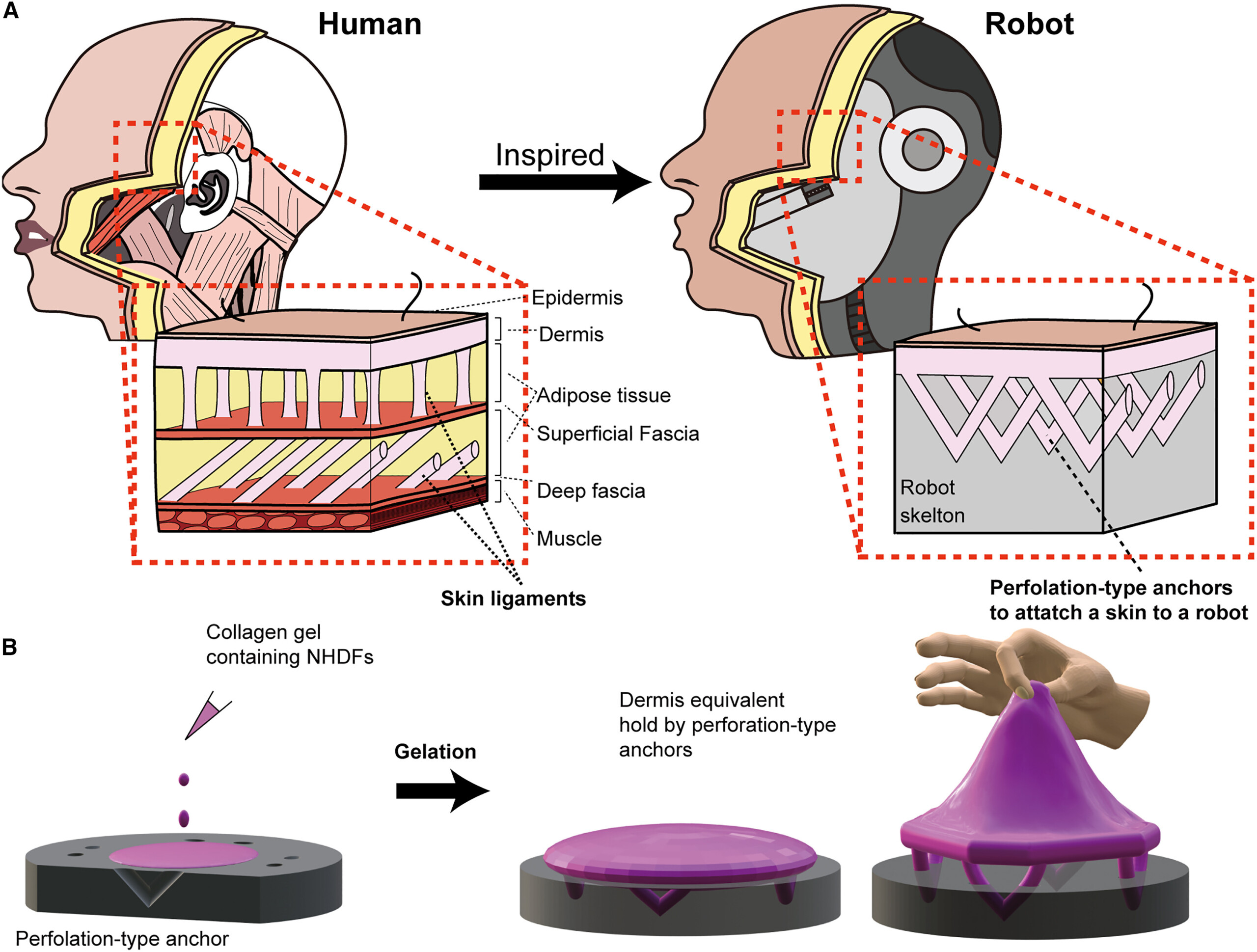
L’utilité de l’ancrage de type perforation
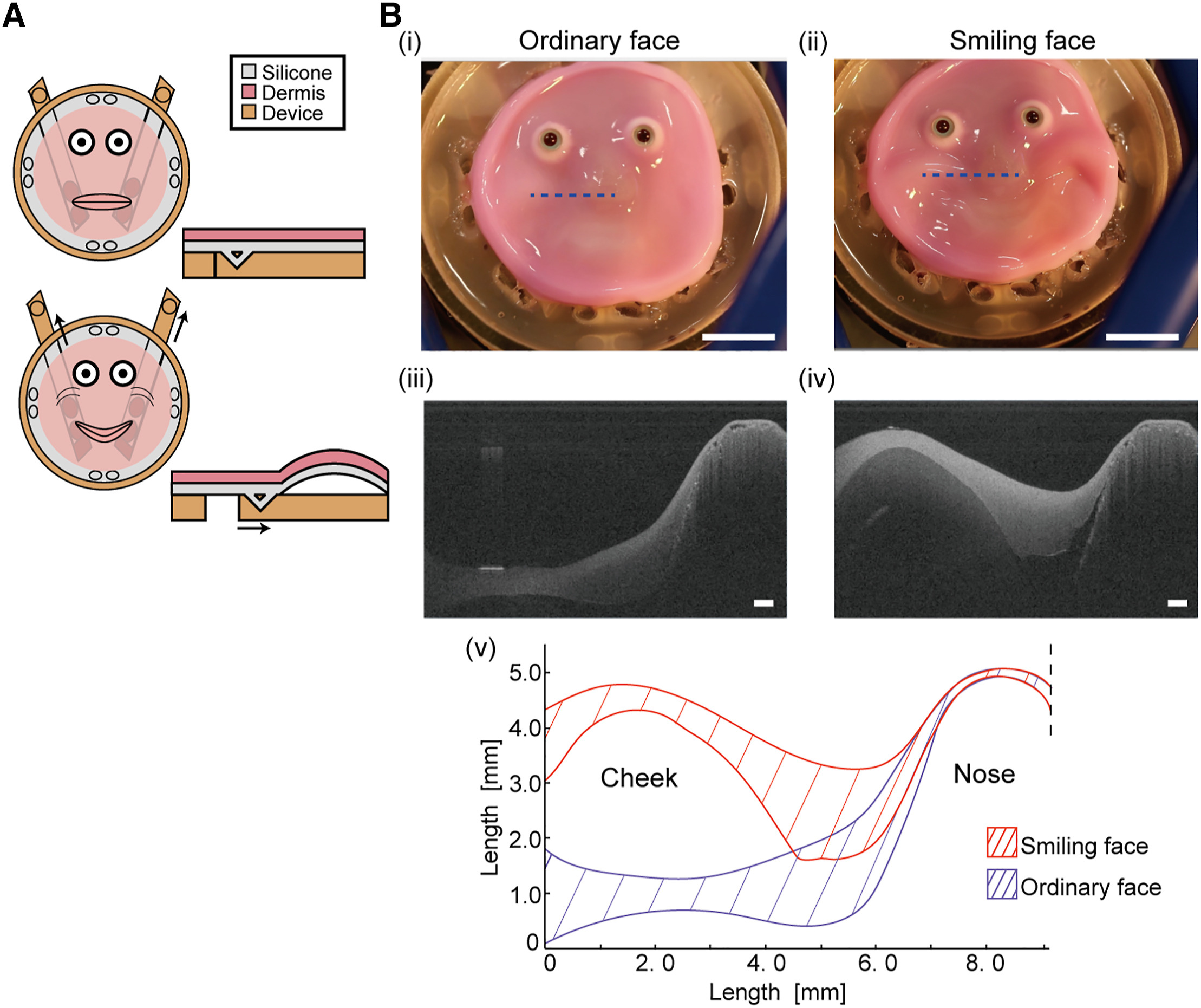
La surface de cette structure en résine est parsemée de petits trous en forme de V dans lesquelles vient se loger le gel de peau de synthèse. Ce sont les ancres de type perforation qui vont imiter les ligaments cutanés humains qui permettent à la peau de se fixer solidement aux tissus sous-jacents tout en restant flexible pour obtenir les expressions faciales et les mouvements corporels.
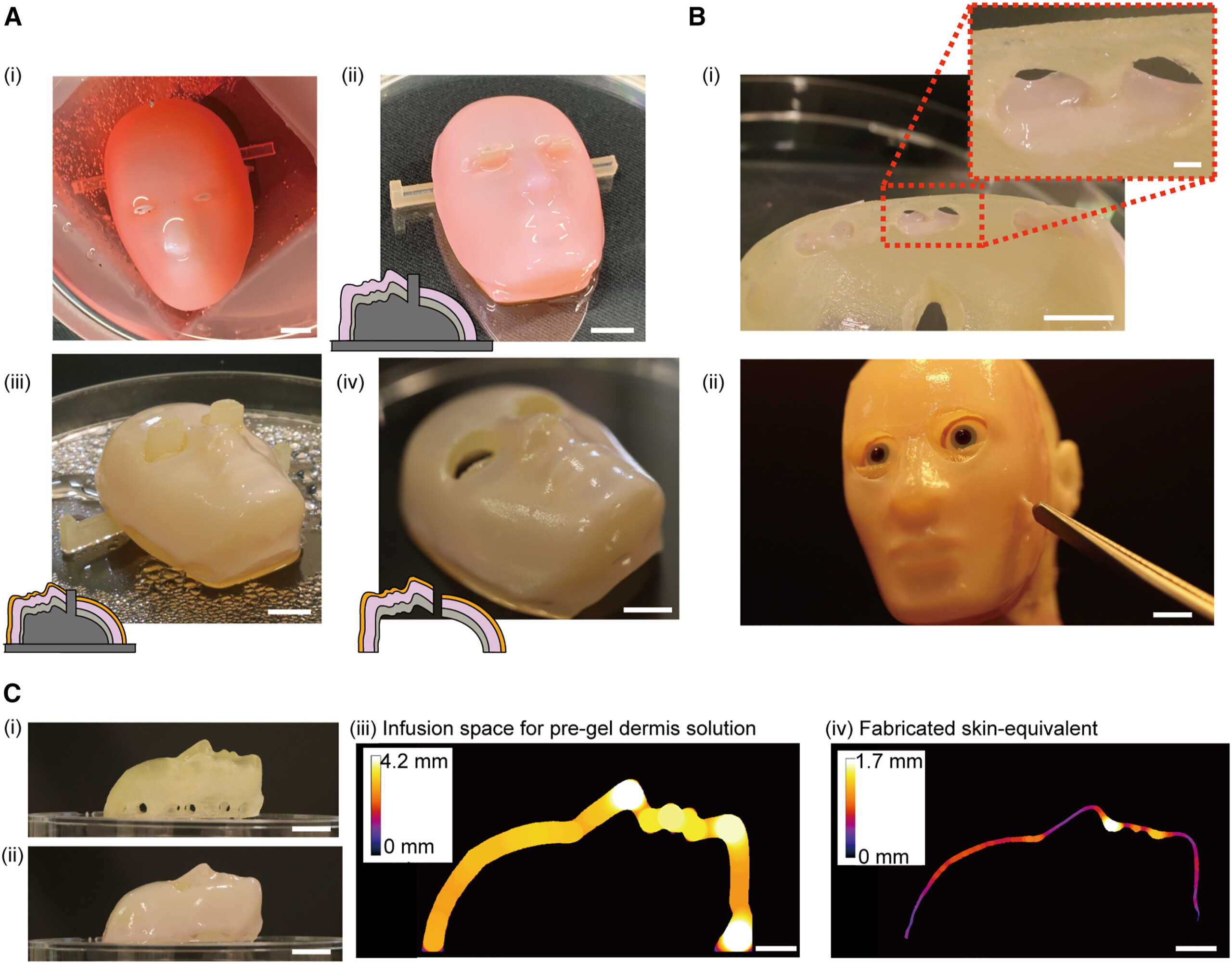
Un traitement au plasma à base de vapeur d’eau intervient ensuite pour rendre la surface du dispositif plus hydrophile, améliorant ainsi la pénétration du gel dans les ancrages. Cette étape est essentielle pour assurer une fixation solide de la peau sur la surface du robot, même dans les zones difficiles d’accès.
Un procédé plus efficace
Les chercheurs ont d’abord testé l’efficacité des ancrages en utilisant des moules faciaux en 3D recouverts de peau vivante. Ils ont démontré que les ancrages de type perforation permettaient de maintenir la peau en place de manière plus stable par rapport aux méthodes précédemment mises en place. Les tests de contraction ont validé le fait que les ancrages empêchaient la peau de se rétracter excessivement, ce qui est crucial pour maintenir l’intégrité de la peau sur le long terme.
Des tests de traction ont été effectués pour mesurer la résistance des ancrages. Cela a permis de déterminer que les ancrages de plus grand diamètre augmentaient la résistance à la traction, bien qu’il soit nécessaire de trouver un équilibre entre la taille des ancrages et l’espace qu’ils occupent sur le dispositif.
La peau de synthèse, une idée pas encore assez durable
Cette nouvelle méthode d’ancrage de type perforation représente une avancée significative dans le domaine de la robotique biohybride. En imitant la structure des ligaments cutanés humains, cette technique permet de fixer solidement une peau vivante sur des surfaces robotiques, tout en maintenant la flexibilité nécessaire pour les expressions faciales et les mouvements. Cela ouvre la voie à des robots plus réalistes et fonctionnels, capables de s’adapter et de se réparer dans des environnements complexes.
Néanmoins, les chercheurs japonais soulignent que la peau de synthèse n’est pas durable actuellement. Elle est dénuée de réseau nerveux et de vaisseaux sanguins. Sans nutriment ni humidité, elle ne survit pas longtemps à l’air libre.

Ce contenu est bloqué car vous n'avez pas accepté les cookies et autres traceurs. Ce contenu est fourni par Disqus.
Pour pouvoir le visualiser, vous devez accepter l'usage étant opéré par Disqus avec vos données qui pourront être utilisées pour les finalités suivantes : vous permettre de visualiser et de partager des contenus avec des médias sociaux, favoriser le développement et l'amélioration des produits d'Humanoid et de ses partenaires, vous afficher des publicités personnalisées par rapport à votre profil et activité, vous définir un profil publicitaire personnalisé, mesurer la performance des publicités et du contenu de ce site et mesurer l'audience de ce site (en savoir plus)
En cliquant sur « J’accepte tout », vous consentez aux finalités susmentionnées pour l’ensemble des cookies et autres traceurs déposés par Humanoid et .
Vous gardez la possibilité de retirer votre consentement à tout moment. Pour plus d’informations, nous vous invitons à prendre connaissance de notre Politique cookies.