
De la même manière qu’un moteur thermique, il existe plusieurs types de moteurs électriques. Globalement, on ne les détaille pas forcément tous lorsque l’on essaye une nouvelle voiture électrique, car même s’il existe plusieurs types de moteurs, la différence en termes d’agrément de conduite ne se fait que peu ressentir. En réalité, cela a plutôt une influence sur les consommations et, surtout, les coûts pour les constructeurs qui, inévitablement, impacts les prix des voitures.
Comme sur le thermique ? Bien entendu, un bloc V8 consommera évidemment plus qu’un quatre cylindres, mais l’agrément ne sera pas le même. Plus onctueux, plus puissant, plus coupleux… Un V8 aura des avantages qu’un quatre cylindres n’aura pas. Le « quatre pattes » de son côté sera plus léger, consommera moins et coûtera moins cher à produire.
Les moteurs électriques offrent donc une variété de conceptions avec des fonctionnements spécifiques, et nous pouvons les ranger dans quatre sous-catégories, elles-mêmes rangées dans deux grandes catégories que sont les moteurs synchrones et asynchrones.
Les différences entre un moteur synchrone et asynchrone
Moteur synchrone
Un moteur synchrone est un type de moteur électrique dans lequel la vitesse de rotation de l’arbre de sortie est directement proportionnelle à la fréquence de l’alimentation électrique et est synchronisée avec la fréquence de l’alimentation. Cela signifie que la vitesse de rotation du rotor du moteur est synchronisée avec la fréquence de l’alimentation électrique fournie au stator, d’où son nom.
Dans un moteur synchrone, le rotor tourne à une vitesse constante, connue sous le nom de vitesse synchrone, qui est déterminée par la fréquence de l’alimentation électrique et le nombre de pôles du moteur. Ces moteurs sont largement utilisés dans les applications où une vitesse de rotation constante et précise est requise, telles que les générateurs électriques, les équipements industriels et les systèmes de conversion d’énergie.
Les moteurs synchrones nécessitent généralement un système de démarrage externe pour atteindre la vitesse synchrone au démarrage, après quoi ils peuvent fonctionner de manière stable à cette vitesse. Ils sont également souvent utilisés dans des applications où le couple de démarrage est important.
Au sein de l’industrie automobile, l’immense majorité des voitures électriques sont équipés de moteur synchrone car ceux-ci sont plus simples à mettre au point que les moteurs asynchrone, et leur rendement est aussi meilleur, avec jusqu’à 93 % en fonction du régime du moteur. En revanche, ils sont aussi plus chers et à des vitesse élevée, il n’est pas rare de tomber à 60 % de rendement.
Moteur asynchrone
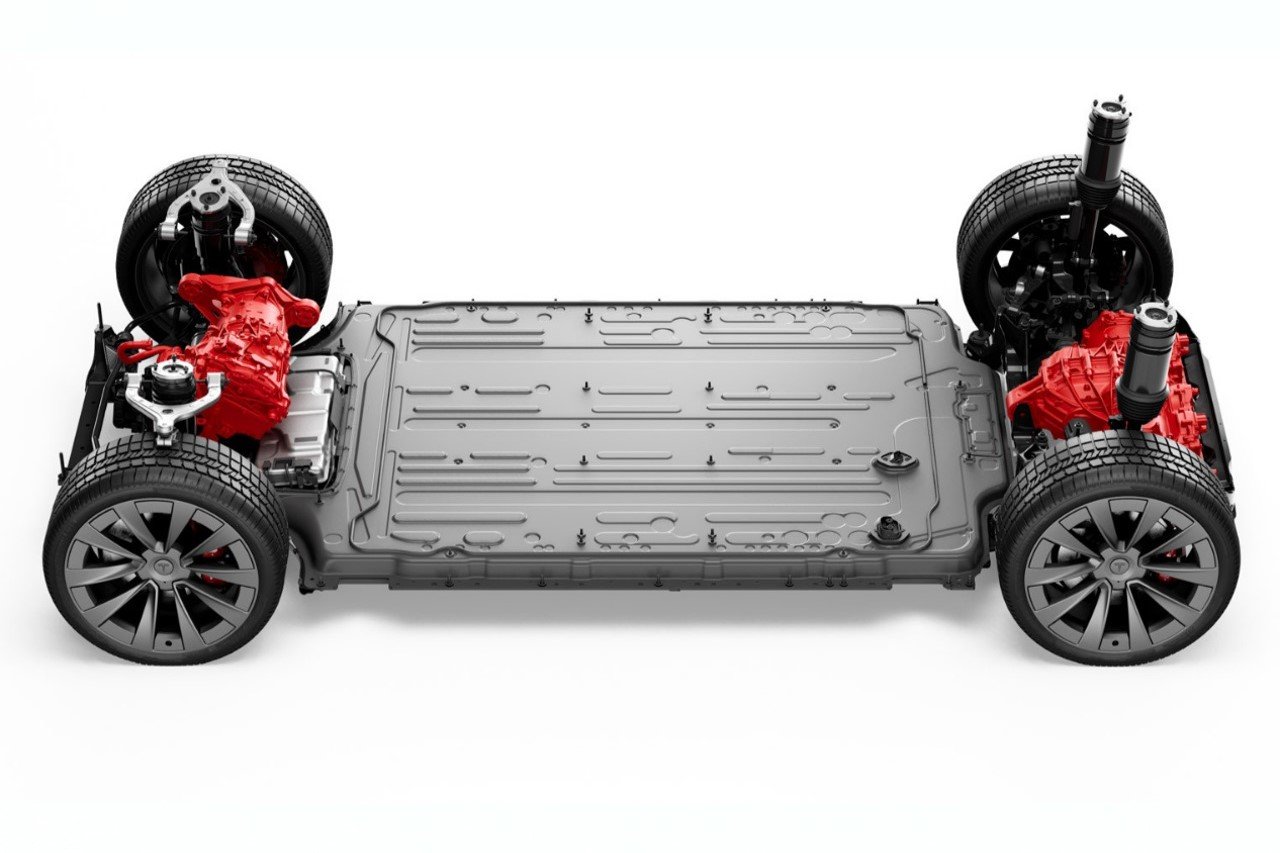
De son côté, le moteur électrique asynchrone, également connu sous le nom de « moteur à induction », est un type de moteur électrique largement utilisé dans diverses applications industrielles et domestiques. Un peu moins en automobile donc, même si Tesla l’utilise pour ses modèles Dual Motor (deux moteurs). Il fonctionne sur le principe de l’induction électromagnétique.
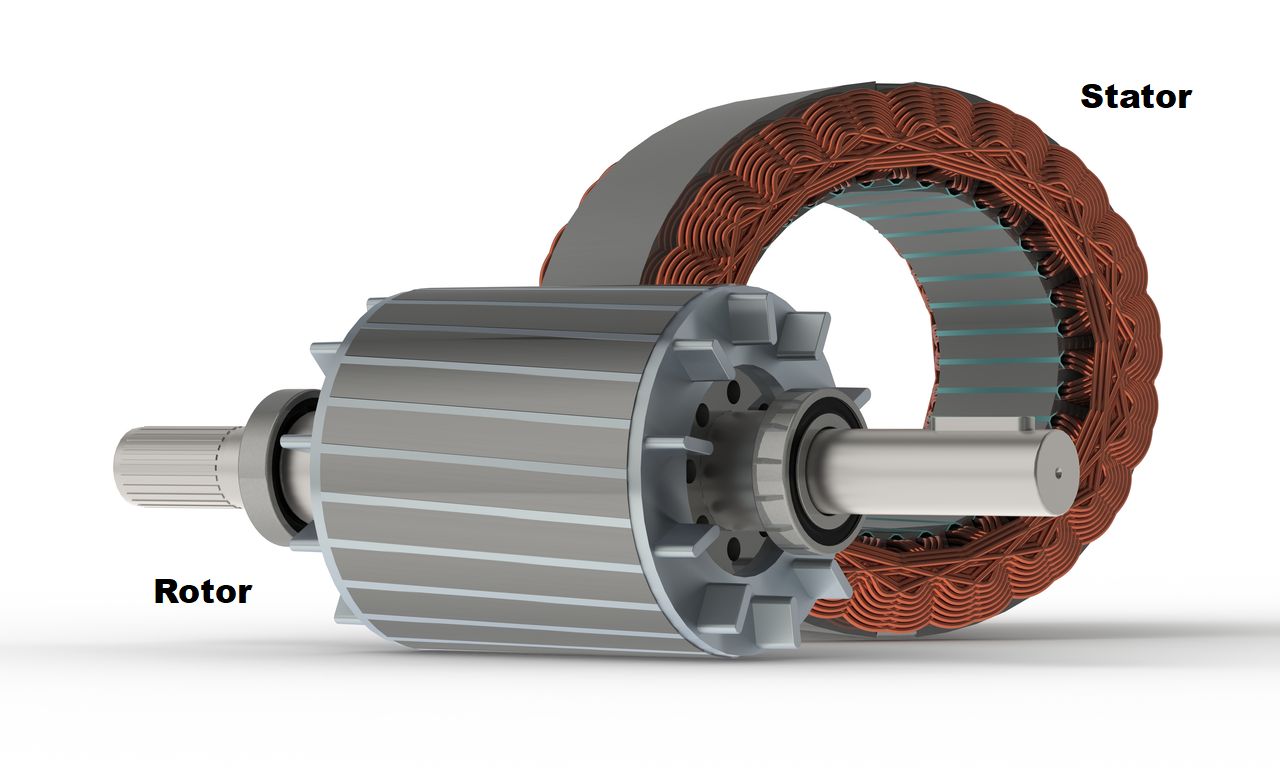
Le moteur asynchrone se compose de deux parties principales : le stator et le rotor. Le stator est la partie fixe du moteur et est composé de bobines enroulées autour d’un noyau de fer. Le rotor est la partie mobile du moteur. Lorsqu’un courant alternatif est appliqué au stator, un champ magnétique tournant est créé autour des bobines du stator. Ce champ magnétique tournant induit un courant électrique dans le rotor, même s’il n’y a pas de connexion électrique directe entre le stator et le rotor.
Ce courant induit crée un champ magnétique dans le rotor qui interagit avec le champ magnétique tournant du stator, générant ainsi un couple moteur qui fait tourner le rotor. La vitesse de rotation du rotor est légèrement inférieure à la vitesse de rotation du champ magnétique tournant du stator. C’est pourquoi on l’appelle « asynchrone », car il n’y a pas de connexion mécanique directe entre le stator et le rotor pour synchroniser leur vitesse.
Les moteurs asynchrones sont robustes, fiables et peu coûteux, mais son rendement n’est pas optimal, avec un plafond à environ 80 %, même si Tesla est parvenu à atteindre 88 % à haut régime via diverses solutions techniques et l’optimisation du fonctionnement par l’électronique de puissance, en employant notamment l’envoi de courant dans les inducteurs pour faire baisser la consommation. Tesla abandonne néanmoins peu à peu ces moteurs pour s’orienter vers des blocs à réluctance variable dont nous vous parlerons un peu plus bas.
Moteur à aimants permanents
Il fait partie de la famille des moteurs synchrones, c’est aussi le plus simple à décrypter et le plus répandu au sein de l’industrie automobile aujourd’hui.
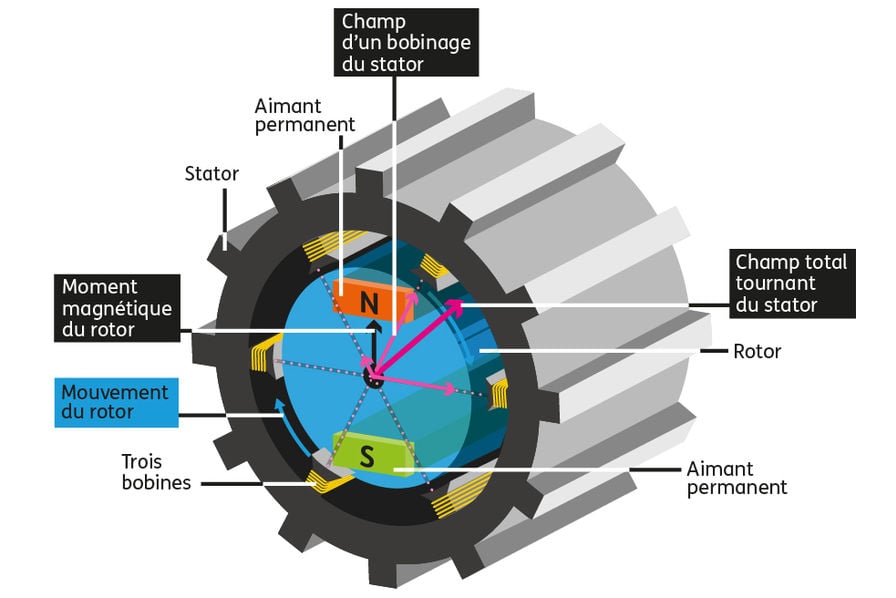
Un moteur à aimants permanents est un type de bloc électrique dans lequel les aimants permanents sont utilisés pour créer un champ magnétique stable. Contrairement aux moteurs traditionnels qui utilisent des bobines électromagnétiques pour créer un champ magnétique, les moteurs à aimants permanents utilisent des aimants qui conservent leur magnétisme sans nécessiter d’alimentation électrique externe.
Dans un moteur à aimants permanents, les aimants sont généralement placés sur le rotor (la partie mobile) du moteur. Lorsque le rotor est entraîné en rotation, le champ magnétique des aimants interagit avec le champ magnétique créé par les bobines du stator (la partie fixe) du moteur. Cette interaction génère un couple qui fait tourner le rotor et entraîne le fonctionnement du moteur.
Les moteurs à aimants permanents sont souvent appréciés pour leur efficacité énergétique, leur compacité et leur faible entretien. Ils sont largement utilisés dans une variété d’applications, notamment dans les véhicules électriques, les éoliennes, les équipements industriels et les appareils électroniques. Les moteurs à aimants permanents offrent plusieurs avantages, à commencer par leur efficacité. En éliminant les pertes associées aux bobinages du rotor, ces moteurs surpassent généralement les moteurs à induction en termes d’efficacité énergétique. En d’autres termes, ils consomment beaucoup moins d’électricité et favorisent ainsi l’autonomie des voitures électriques.
La densité de puissance est également supérieure. Ils peuvent ainsi produire davantage de puissance pour un volume ou un poids donné par rapport à d’autres types de moteurs. Cette propriété les rend particulièrement adaptés aux applications où l’espace et le poids sont des facteurs critiques, et ça l’est dans l’automobile où chaque cm2 compte. En outre, les moteurs à aimants permanents nécessitent peu d’entretien. En l’absence de contacts glissants ou de balais, les problèmes d’usure sont réduits. Ces moteurs offrent de bonnes performances à basse vitesse et peuvent maintenir un couple élevé même à des vitesses réduites.
Que des avantages ces moteurs à aimants permanent ? Pas forcément, car comme énoncé plus haut, ces moteurs sont composés de matériaux magnétiques permanents, en particulier ceux à base de terres rares comme le néodyme, qui peuvent être coûteux. Les aimants permanents peuvent aussi perdre leur magnétisme s’ils sont exposés à des températures élevées, nécessitant obligatoire un système de gestion thermique efficace.
Moteur à excitation
Eux aussi font partie de la grande famille des moteurs synchrones, mais sont un peu moins répandus dans l’univers automobile. Un moteur électrique à excitation est un type de bloc où le champ magnétique nécessaire à la production de mouvement est créé par un courant électrique alimentant un enroulement appelé « enroulement d’excitation ». Ce type de moteur utilise un circuit d’excitation supplémentaire, en plus du circuit d’alimentation principal, pour générer ce champ magnétique.
Il existe deux principaux types de moteurs électriques à excitation :
- Moteurs à excitation séparée : dans ce type de moteur, le courant d’excitation est fourni par une source externe indépendante du circuit d’alimentation principal.
- Moteurs à excitation auto-excitée : ces moteurs n’ont pas besoin d’une source d’excitation externe. Le champ magnétique est créé par le courant provenant du circuit d’alimentation principal, généralement via des enroulements spéciaux.

Globalement, ces moteurs offrent un meilleur contrôle de la vitesse et du couple, ainsi qu’une grande flexibilité dans leur conception. Le rotor est aussi peu coûteux et polluant à produire et il n’y a pas de terres rares qui composent les aimants permanents. Le rendement est intéressant avec quelque chose qui est assez semblable aux moteurs à aimant permanent, soit près de 90 %.
Côté inconvénient, l’alimentation du rotor induit de la chaleur, on a donc plus de risque de surchauffe qui peut à terme fatiguer le moteur. Cela réclame donc plus d’entretien. La Renault Zoé, qui vient de nous quitter, dispose de ce type de moteur et Renault préconise un entretien tous les 70 000 km.
Moteur à réluctance variable
C’est le troisième larron de la famille des moteurs synchrones. Globalement, vous n’avez sans doute pas souvent entendu parler de ce type de moteur, et c’est un peu normal, puisque c’est la technologie la plus récente et il est utilisé principalement pour les machines de précision. Tesla et Toyota (entre autres) ont eu l’idée de l’utiliser pour la propulsion de ses autos.
Les moteurs électriques à réluctance variable exploitent le concept de réluctance magnétique, qui est la résistance au flux magnétique dans un matériau. Contrairement aux moteurs conventionnels où le champ magnétique est généré par des aimants permanents ou des bobines de cuivre, les moteurs à réluctance variable utilisent la géométrie variable des matériaux ferromagnétiques pour contrôler le flux magnétique. Le découpage du moteur illustré via l’image ci-dessous permet de mieux comprendre son fonctionnement.
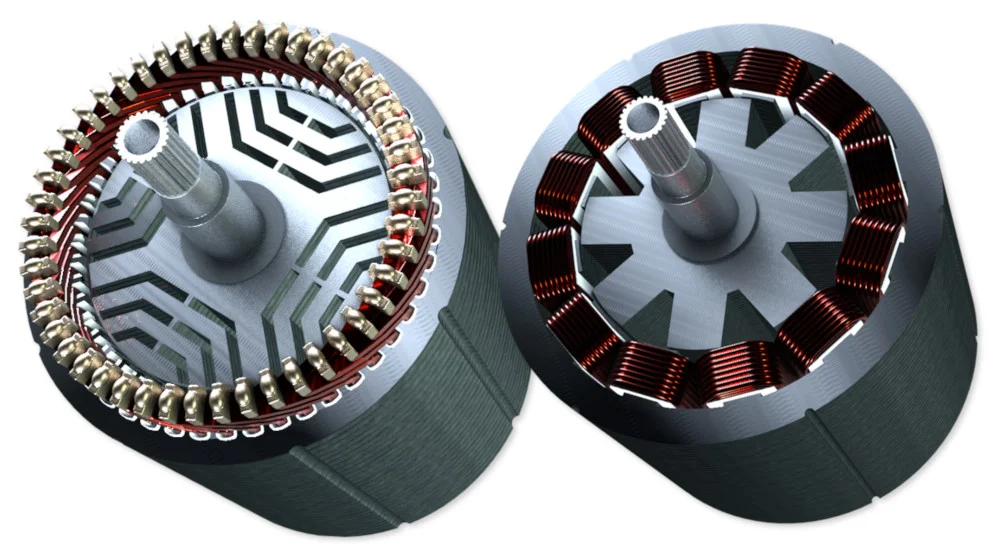
Un moteur à réluctance variable se compose généralement d’un stator et d’un rotor, semblable à de nombreux autres moteurs électriques. Cependant, tant le stator que le rotor sont conçus avec des pôles à réluctance, formant un circuit magnétique interne complexe. Ce circuit peut être ajusté pour modifier la réluctance et donc le cheminement du flux magnétique à travers le moteur.
Ce moteur est plein d’avantages, à commencer par les coûts, puisqu’il n’est pas cher à produire. C’est ce qui plaît notamment beaucoup à Tesla, qui n’est jamais le dernier pour réaliser quelques précieuses économies. Il est aussi compact et léger. Son rendement est aussi très bon puisqu’on parle aujourd’hui d’un rendement jusqu’à 95%, soit le meilleur pour un moteur électrique ! Cela est en grande partie dû au fait que ce moteur ne chauffe pas beaucoup, et donc on a moins de perte thermique. Mais alors pourquoi ne s’est-il pas encore démocratisé s’ils regorgent d’avantages ?
Paroles d’ingénieurs, ce moteur est difficile à exploiter et les bons réglages sont extrêmement difficile à trouver. Pour le coup, on pourrait presque parler de « moteur d’ingénieurs », comme pour certains blocs thermiques. Certains pourraient faire le parallèle avec les réglages de certains moteurs italiens thermiques de la grande époque, ils n’auraient pas forcément tort. La fabrication est aussi assez compliquée puisque ce moteur nécessite un assemblage de grande précision, notamment pour obtenir le rendement annoncé ci-dessus.
Utilisez-vous Google News (Actualités en France) ? Vous pouvez suivre vos médias favoris. Suivez Frandroid sur Google News (et Numerama).




















Ce contenu est bloqué car vous n'avez pas accepté les cookies et autres traceurs. Ce contenu est fourni par Disqus.
Pour pouvoir le visualiser, vous devez accepter l'usage étant opéré par Disqus avec vos données qui pourront être utilisées pour les finalités suivantes : vous permettre de visualiser et de partager des contenus avec des médias sociaux, favoriser le développement et l'amélioration des produits d'Humanoid et de ses partenaires, vous afficher des publicités personnalisées par rapport à votre profil et activité, vous définir un profil publicitaire personnalisé, mesurer la performance des publicités et du contenu de ce site et mesurer l'audience de ce site (en savoir plus)
En cliquant sur « J’accepte tout », vous consentez aux finalités susmentionnées pour l’ensemble des cookies et autres traceurs déposés par Humanoid et ses partenaires.
Vous gardez la possibilité de retirer votre consentement à tout moment. Pour plus d’informations, nous vous invitons à prendre connaissance de notre Politique cookies.
Gérer mes choix